とうとうフライト最後のフェーズ「アプローチ」そして「着陸」です!伊丹空港までもう少しですので頑張りましょう!
目次を見ていただけるとわかるのですが、非常に長い記事になってしまいました。記事を分割しようと思ったのですが、「アプローチ~着陸」という工程はどうしても切り離せず、またやることも多いため文章量が多くなってしまいました。
難しいところもありますが、一番楽しいフェーズです!何回か練習して着陸できるようにしましょう!今回使用する「ILS」での着陸ができるようになれば、伊丹空港以外の空港でもILSを使って着陸できるようになりますよ!
この記事は前回の記事の続きになります。まだ見ていない方はこちらもご覧ください!

なお、記事が長いことや操作量の多さから、フライトしながらこの記事をご覧になられる方は、適宜「一時停止」をしながらお読みいただくことをお勧めします。
着陸のための設定を確認する

前回の続きからとなります。現在「MIRAI」まであと10NMの地点にいます。「MIRAI」までは6000ftで250ktで飛行して、「MIRAI」を通過したら「IKOMA」を210kt、3500ftで通過するよう減速と降下をします。
前回の記事で解説ができていなかったのですが、「CSTR」ボタンを押すと高度制限等の情報をND上に表示させることが可能です。ただし、ある程度近づかないと表示されなかったりします。
「IKOMA」を通過したら空港はすぐなので、着陸に向けて最終確認をしましょう。
ILSを受信できる状態か確認する
今回の着陸には「ILS(アイエルエス)」を利用します。「ILS」とはざっくりいうと、滑走路への進入コースとなるように誘導電波をだして、滑走路まで機体を導くシステムのことです。飛行機はこの電波を受信することで機体の向きや降下率を制御しながら滑走路まで向かうことができます。「ILS」を利用すれば、滑走路の直前まで自動操縦で飛行することができるため、フライトシミュレータ初心者の着陸練習にうってつけです。
このILSが使える状態になっているか確認しましょう。
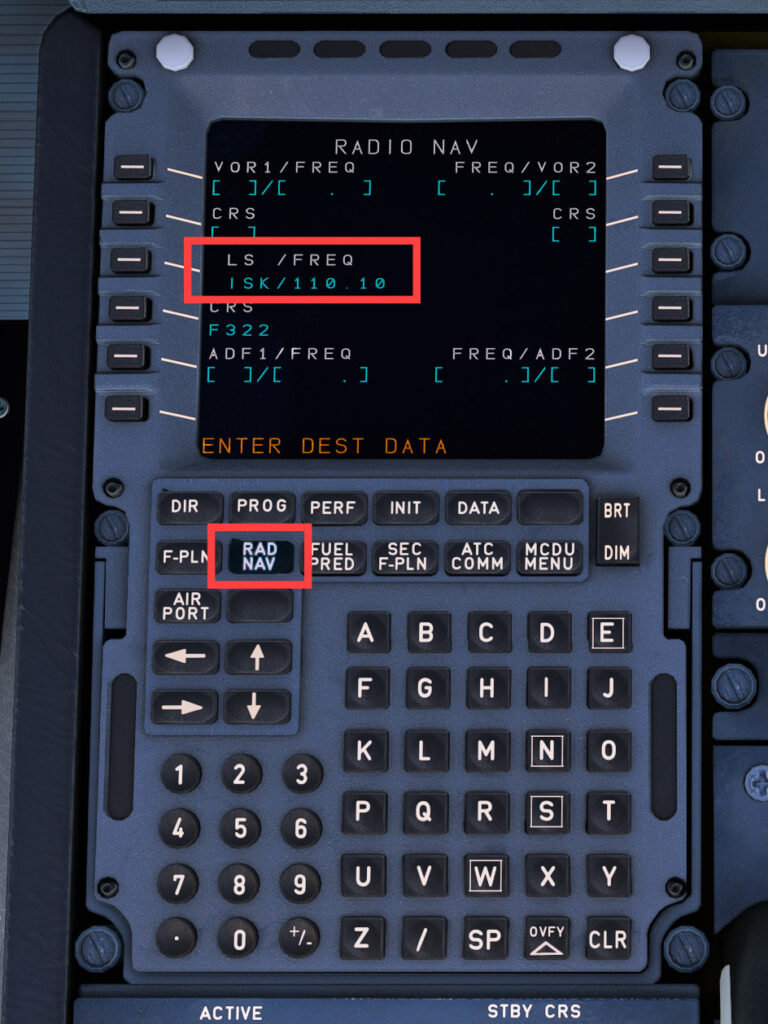
- 「MCDU」の「RAD NAV」を押します。
- 「LS/FREQ」に「ISK/110.10」が表示されていることを確認します。
この「110.10」が伊丹空港32L滑走路のILS電波の周波数です。
着陸に向けた設定を行う
ILSの電波を正しく受信できそうなので、次は着陸に向けた設定を行います。
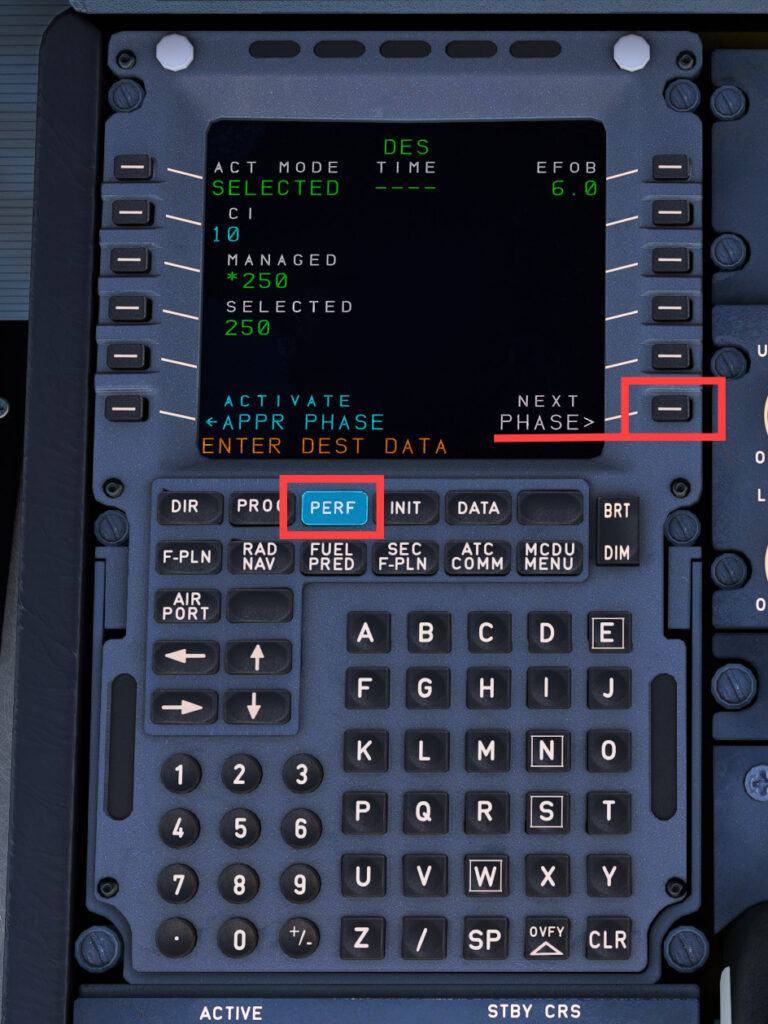
- 「MCDU」の「PERF」を押します。
- 「NEXT PHASE」を押します。
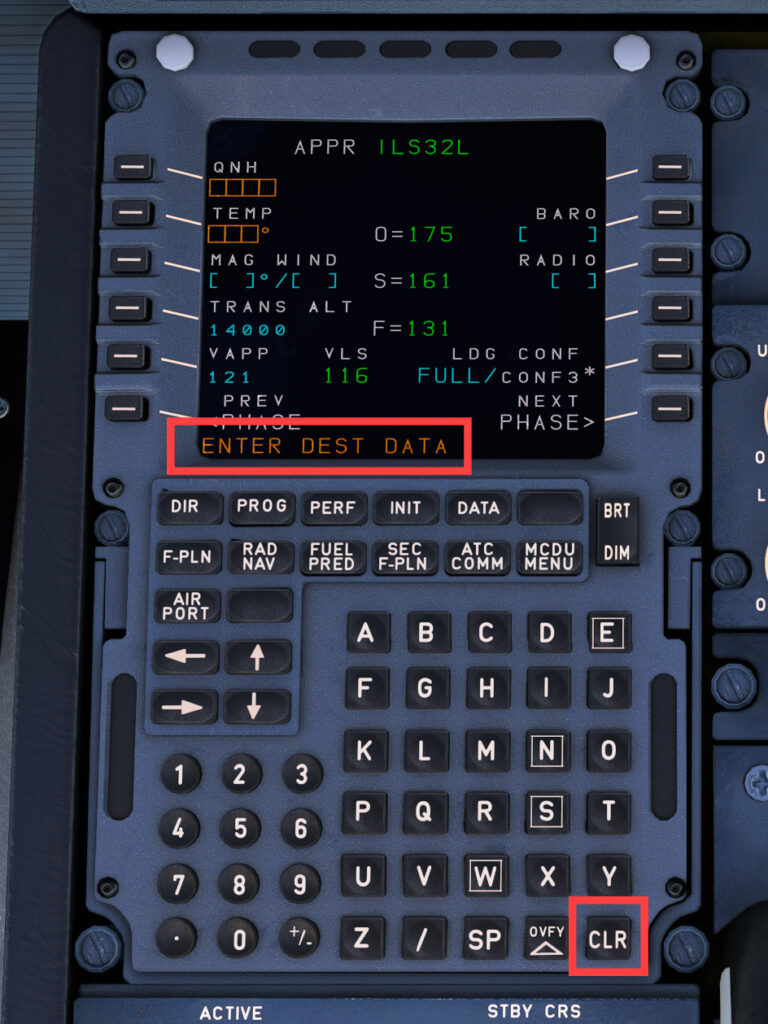
- 「ENTER DEST DATA」と表示されているので、「CLR」ボタンを押してメッセージをクリアします。
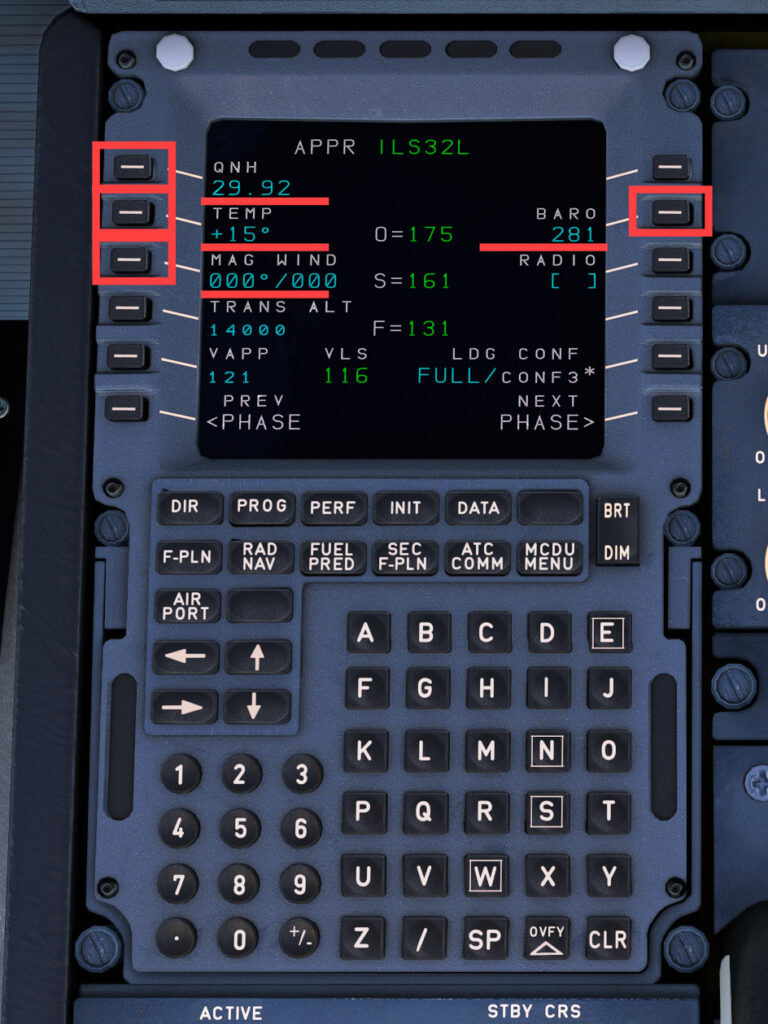
- 「QNH」に着陸空港の高度計規正値、今回は「29.92」を入力します。
- 「TEMP」に到着空港の温度、今回は「15」を入力します。(「+」は入力しなくとも勝手に表示されます)
- 「MAG WIND」に到着空港の風向風速、今回は「0/0」を入力します。(「0/0」と入力すれば「000°/000」と表示されます)
- 「BARO」に着陸時の「Decision Altitude(決心高)」を入力します。今回は「281」を入力します。
「QNH」「TEMP」「MAG WIND」については、今回は気象状態を固定かつ風を無風状態にしているので、このような設定になっています。リアルウェザー等で飛ぶときは、空港の情報を確認してから入力する必要があります。
また、「Decision Altitude(決心高)」は悪天候等で滑走路が見えないとき、「この高度まで滑走路が見えないときは着陸を諦める(やり直す)」という高度です。この数字は、空港によっても滑走路によっても、また滑走路へのアプローチ方法によっても異なっています。正確に入力するには滑走路へのアプローチ方法を示した「チャート」を参照する必要があります。
ただ、これらの項目はシミュレータで気軽に飛行するには必須ではありません。最悪、入力せずともシミュレータ上においては着陸が可能です。
空港に向けて最後の降下と減速

もうそろそろ「MIRAI」を通過します。「MIRAI」を通過したら「IKOMA」に向けて、減速・降下をしましょう。
210ktに減速する

- スピードノブを回して「210」と表示させます。
- スピードノブを引いて(下方向矢印でクリック)、スピードを「セレクテッドモード」にします。

- 減速していることを確認します。
3500ftに降下する

- 高度セレクタノブの「根元の部分」を反時計回りに回します。これで「100ft」ごとに入力可能になります。

- 高度セレクタノブを回して「3500」と表示させます。
- 高度セレクタノブを引いて(下方向矢印でクリック)、セレクテッドモードにします。
- 降下していることを確認します。
ILSアプローチ

「IKOMA」に向けて順調に減速・降下をしています。ND(ナビゲーションディスプレイ)のレンジを20NMにすると、端っこに空港が見えてきました!
ここで確認できるのは「IKOMA」で右旋回すると滑走路が真正面にくる(=「IKOMA」が着陸に向けての最終旋回)ということです。ここまでくれば、ILSの電波を受信できます。
ここからはILSの電波に乗って、滑走路まで自動操縦で行きましょう!
ILSの電波を受信する

- ILSの電波受信状況を確認するため、「LS」ボタンを押します。

「LS」ボタンを押すと、「PFD(プライマリ・フライト・ディスプレイ)」の右上と左下にマゼンタ色のマークが出てきました。これがILSの電波を示しています。ちゃんとILSの電波を受信できています!
ILSを使って滑走路へアプローチするためにもう少し詳しくILSを説明します。
実は、ILSには2種類の電波があります。
滑走路に向けて横方向の正しい向き(滑走路への向き)を示してくれる「ローカライザー」、滑走路へ向けて縦方向の正しい向き(降下角度)を示してくれる「グライドスロープ」です。
上のような画像では、左下の丸印で囲ったマークは「ローカライザーは機体よりもっと左にある」(滑走路に向かって線をまっすぐに伸ばしたら、その線より右側を飛んでいる)ことを示しています。また、右上の丸印で囲ったマークは「グライドスロープは機体よりもっと上にある」(滑走路へ適切に降下するルートの下を飛んでいる)ことを示しています。
ここまでの説明で「それってまずいのでは?」と思うかもしれませんが、これで問題ありません。
思い出してください、いま機体は「IKOMA」に向けて飛行中で「IKOMA」を右旋回すれば滑走路が真正面にくるコースでした。要するに、このまま飛行すれば、滑走路の延長線上に近づく(=「ローカライザー」に近づく)ということです。
「グライドスロープ」が機体の上にあるのも問題ありません。なぜなら、いま機体は「IKOMA」(もっと言うと滑走路)に向けて3500ftで水平飛行中です。滑走路に近づけば近づくほど、「グライドスロープ(滑走路へ適切に降下するルート)」の高度は下がってきます。要するに、このまま飛行すれば、滑走路に適切に降下するルートに近づく(=グライドスロープに近づく)ということです。

そのまま飛行を続けると「ローカライザー」のマークが右側に移動してきました!滑走路への適切なコースに近づいています!
ここまで来たら、ILSの電波に乗って自動操縦するモードに切り替えましょう。
ILSの電波に合わせて自動操縦を行う

- 「APPR」ボタンを押します。

- ILSの電波に合わせて機体が自動的に旋回を始めます。

「APPR」ボタンをプッシュしたので、ILSの電波に合わせて機体が自動操縦されます。
ローカライザーを示す下側のひし形マークが真ん中に来ました。これはローカライザーの電波のど真ん中を飛行中であることを示します。
また、グライドスロープを示すひし形マークも下方向に降りてきました。滑走路への降下コースが間近に迫っていることを示しています。これも、機体が勝手に適切な降下パスになるよう自動操縦してくれます。
あとは滑走路まで自動的に一直線です!
速度調整をマネージドモードにする

降下をするので、ここから先は速度も自動で調整してもらいましょう。
- スピードノブを押し(上方向矢印でクリック)、マネージドモードにします。

- 減速し始めたことを確認します。
ここから先は機体が着陸直前まで自動的に速度管理をしてくれます。
着陸復行・進入復行のことを考える
後は着陸するだけ!ではありません。「もし着陸できなかったらどうするか?」を考える必要があります。
現実世界では、悪天候で滑走路が見えなかったり急な横風に吹かれたり等で、着陸を諦め再度上昇することがあります。シミュレータの世界では操作ミスなどでアプローチに失敗して「このままじゃ、まともな着陸はできなさそう」ということが想定されます。
ここまでおそらく1時間ぐらい飛行しているはずです。最後の最後でうまく着陸できずに残念な結果になるのは避けたいですよね。
ということで、うまく着陸できなさそうなときのプランを考えます。
現実世界では「着陸ができなかったら高度○○ftまで再上昇して、どういうコースを飛んでくださいね」という取り決めがなされています。これも「チャート」を読めばわかるのですが、そこまで読むのは大変ですし、気軽じゃないです。
今回はさすがにそこまでの厳密さは求めず、お気楽に「もう一度着陸をやり直せるプラン」を考えました。

- 着陸に失敗しそうだったら無理に着陸せず、機体を安定させたのち、上昇しながら左旋回する。
- 3500ftまで上昇しながら210ktで飛行、「IKOMA」から滑走路までの直線と3~5NMぐらい離れて並行になるように、方位140に向けて飛行する。
- 「IKOMA」の横を通過したら左旋回をして、もう一度「IKOMA」に向かい、ILSの電波を受信し滑走路へアプローチする。
着陸できなかったらサクッとあきらめて、再度ぐるっと回りこんでILSの電波にもう一度乗るプランです。「1」で左旋回をするのは、伊丹空港には右側にもう一本別の滑走路があるためです。また「2」で方位140を飛ぶのは、今着陸しようとしている滑走路が「32L」ということで、これは「方位320」方向を向いている滑走路であることを示しています。この方位を逆向きに飛ぶ必要があるので、「320-180=140」となります。3~5NMぐらい離れるのは、あんまり近すぎても旋回が急になるのと、旋回操作が遅れた場合、リカバリする時間が無くなってしまうこと、遠すぎても無駄かなという感覚のためです。(実際には2~3NMぐらいあれば十分なはずです)
ここでポイントとなるのは「3500ft・210ktでIKOMAに飛行する」ということです。これは、今まさにやっていること(やってきたこと)ですよね。
IKOMAへ至るルートこそ違いますが、このようにすることで自動操縦の設定など、やることをほぼ同じにすることができます。
着陸のやり直しプランを考えたら、今度こそ着陸に向けて全力で取り組みましょう!できればやり直しプランを使わないように頑張りましょう!

減速しながらフラップとギアを展開する
いま機体は滑走路に向けて直線的に飛行中です。先ほど速度を自動的に調整するよう設定したので、機体は徐々に減速しているはずです。
飛行機は減速すると翼が生み出す揚力が減少します。要するに浮かび上がる力が減ってしまうのです。十分に揚力が得られないと「ストール(失速)」し、最悪墜落してしまいます。しかし、安全に着陸するためには十分に減速する必要があります。
そこで飛行機には、速度が落ちても揚力を得られるよう「フラップ」という機構が翼に備わっています。簡単に言うと低速度でも揚力を得やすくなるよう、翼の形を変える仕組みです。離陸の時にも使いましたね。
しかし、このフラップは翼の形を機械的に変えるという性質上、使ってもよい速度が決まっています。なぜなら、機体の速度が速い状態でフラップを出してしまうと、強い風を受けて壊れてしまうのです。
そんな繊細な「フラップ」ですが、A320(A32NX)なら心配無用です。機体が「フラップを出すべきタイミング」を全部教えてくれます。
FLAP 1

スピードメータに「緑色の〇」が出た速度が「フラップ1」を出すタイミングです。

フラップを1段下げて「フラップ1」にしましょう。
FLAP 2

スピードメータに「緑色のS字」が出た速度が「フラップ2」を出すタイミングです。
今回はこのタイミングで「グライドスロープ」に乗ることができました。自動的に3500ftよりも降下して、「グライドスロープ」に従いながら降下していきます。

フラップをもう一段下げて「フラップ2」にしましょう。
ギアダウン
「フラップ2」にしたタイミングぐらいで、ギアダウンするとよいでしょう。

- 「ギアレバー」を「DOWN」にします。

- 「RWY TURN OFF」を「ON」にします。
- 「NOSE」を「T.O」にします。
オートブレーキの設定
ギアダウンしたタイミングで、オートブレーキの設定もしましょう。今回は滑走路の長さも十分あること、天気が良く滑走路面が乾いていること、お客さんや貨物が載っていないので機体が軽いことから、オートブレーキは「LO(弱め)」にします。オートブレーキの設定をすることで、着陸後は機体が自動的にブレーキをかけてくれます。

- 「AUTO BRK」の「LO」ボタンを押します。
着陸復行時の高度設定
先ほど「フラップ2」にしたタイミングで、機体はグライドスロープに従って自動的に降下をし始めていました。
このタイミングで、着陸を諦めて再度上昇するときの「どの高度まで上昇するか」の設定をします。本来であればチャートに従って「5000ft」を入れるべきなのですが、先ほども書いたとおり、今回はお気楽プランで行きます。
思い出してください。「3500ftまで上昇して210ktで飛行してIKOMAまで戻ってくる」でしたね。
なので今回はすでに入力されている「3500ft」のまま変更しないでおきます。

FLAP 3
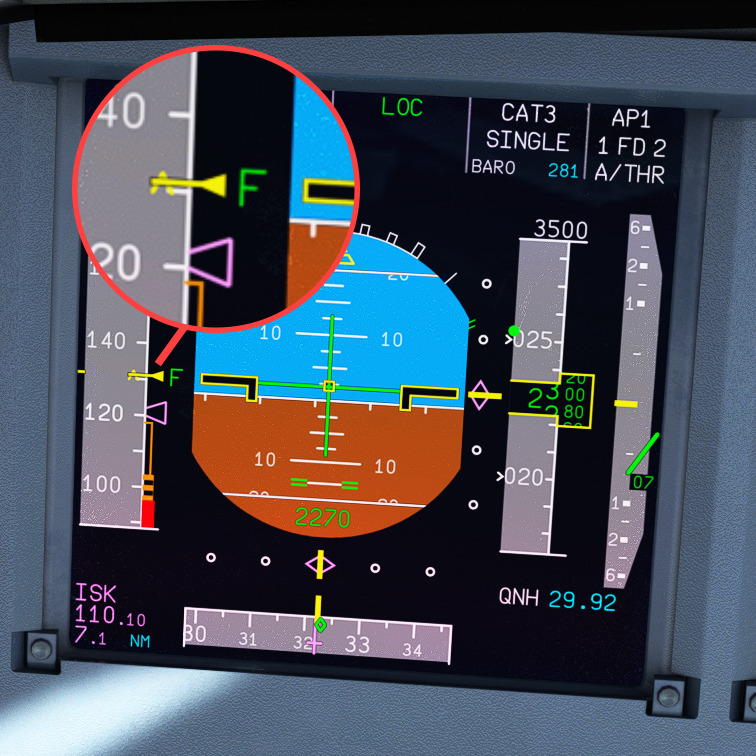
スピードメータに「緑色のF字」が出た速度が「フラップ3」を出すタイミングです。ただ、注意してほしいのは、この「F」のマークは2つのタイミングで表示されるということです。「フラップFULL」を出すタイミングでも「F」のマークが出るのです。

「フラップ2」のときにFマークが出たら「フラップ3」にしてください。
FLAP FULL
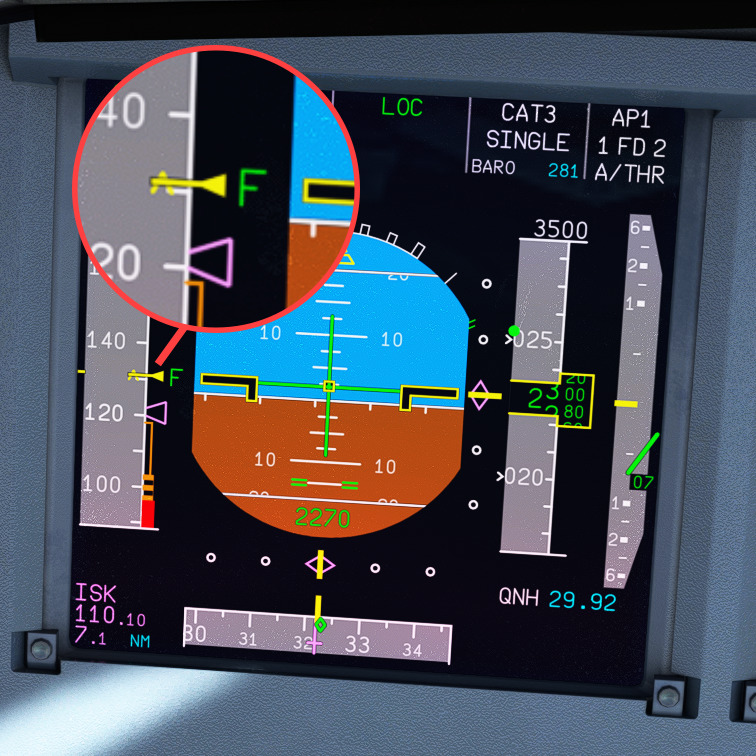
またもや「F」のマークが出てきました。「フラップ3」の時にこの「F」字が出てきた速度が「フラップFULL」にするタイミングです。
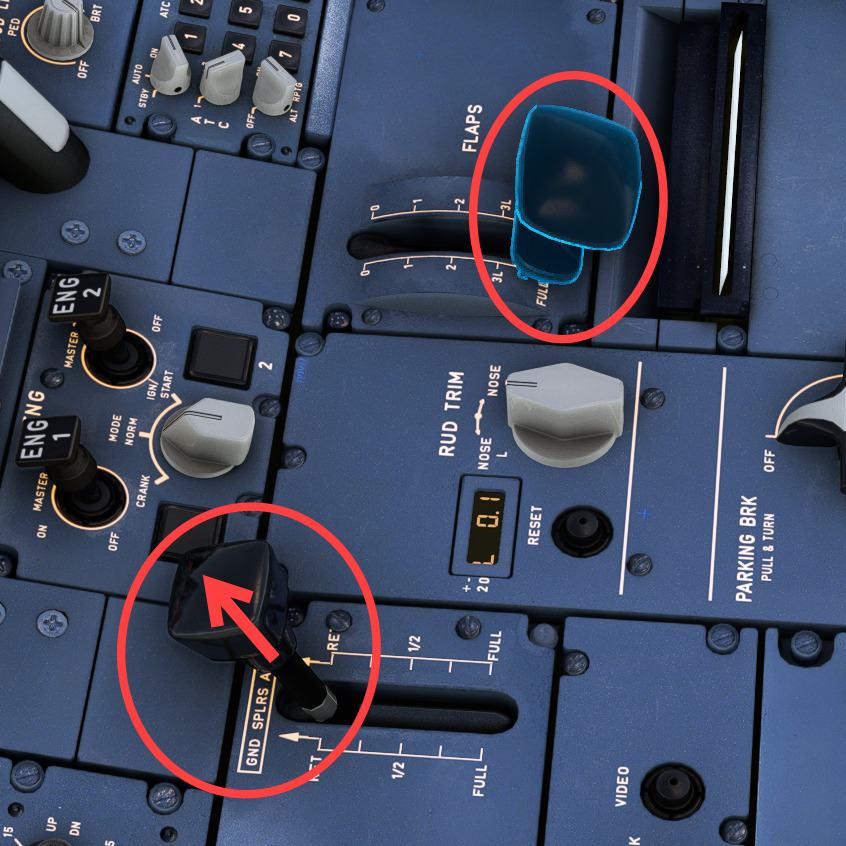
フラップFULLにしましょう。
また、このタイミングで着陸に備え、グラウンドスポイラーをアームド状態(スポイラーのレバーを引き上げる)にしておきます。
着陸前の確認
ここまでの操作を確実に実施できていたら、操縦席中央にある「上部ECAMディスプレイ」に下の画像のようなメッセージが表示されているはずです。

「CABIN」の項目だけ「CHECK」と青字になっています。着陸に向けてまだ未完了のタスクが青字で表示されます。
キャビンに向けて着陸することを伝えましょう。

- 「CALLS」の「ALL」ボタンを押します。
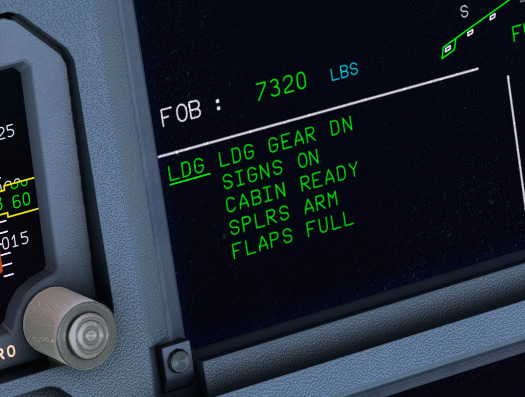
- ECAMメッセージに青色が無くなったことを確認します。
オートパイロットで滑走路の直前まで降下する
ここまでくると、滑走路が前方に視認できているはずです。ここから先は自動的に高度とスピードが落ちていきます。
その途中、男性の声で高度等を読み上げてくれます。最初は「2500ft(「トゥー サウザンド ファイブ ハンドレット」)」とコールしてくれます。この読み上げは電波高度計で読み取った高度をもとに読み上げています。電波高度計は機体の下部から電波を出して、その電波が跳ね返ってくるのにかかった時間で「地面から機体までの距離」を算出しています。なのでこの「2500ft」という読み上げは、「地面まであと2500ft」ということになります。伊丹空港のように海抜からそう高くない空港であれば、これまでフライト中に使っていた高度計とほぼ同じ数字になりますが、松本空港のように高地にある空港だと、まったく違う数字になるので注意が必要です。
またこの電波高度計は、地面に電波を出して距離を計測する仕組み上、飛行経路の地面に大きなビルや丘があったりすると、一時的に急に地面と飛行機との距離が短く計測されます。そのため、「2500ft」などの読み上げが複数回行われることがあります。これは正常な動作なので、気にしなくて大丈夫です。(というかそこまでシミュレートできるMSFS2020とA32NXがすごい)
これから着陸に向けて、この電波高度計の読み上げが目安になるので、耳を傾けておきましょう。
1000ft(「ワン・サウザンド」コール)

地面まで1000ftを切りました。空港はだいぶ近づきましたが、まだちょっと距離がありますね。「PFD」をみると、121ktぐらいで、降下率700ft/minで降下していることがわかります。降下率700ft/minぐらいが今回の伊丹空港へのアプローチで適切な降下率のようです。覚えておきましょう。
腕に自信があるなら、この距離からオートパイロットを切って手動で着陸を試みてもよいのですが、もうちょっと自動操縦に頼ることにしましょう。
500ft(「ファイブ・ハンドレット」コール)

地面まで500ftになりました。だいぶ滑走路が近くなりましたね。
PFDをみると現在の降下率は600ft/minのようです。1000ftの時に確認した降下率と違いますね。降下率は100ft単位でしか表示されないので、適切な降下率は600~700ft/minぐらいだ、ということを覚えておきましょう。オートパイロットを切って手動で降りるときは、この降下率になるようにサイドスティックを調整します。
滑走路の左横に「白白赤赤」と並ぶライトが見えます。これは「PAPI(パピ)」と呼ばれるライトで、機体が適切な降下角度で降りているかを確認できるようにする仕組みです。
今回のように「白白赤赤」と2つずつ見えていれば適切な角度で降下できています。
このPAPIが「白赤赤赤」だと適切な降下角度を上回って降下している(=高度が低い)、「赤赤赤赤」だと高度が低すぎる、という意味になります。白が多い場合は逆に降下率が小さい(=高度が高い)、高度が高すぎるを表しています。
手動で着陸するときは、このPAPIの色が「白白赤赤」になるように降下率を微調整しながら降りていきます。
もし「白白赤赤」から「白赤赤赤」となってしまったら、今の降下率が大きいということになります。適切な降下パスに戻るために、先ほど見積もった適切な降下率(600~700ft/min)よりちょっと小さい降下率(500~600ft/minくらい)になるようにサイドスティックをゆっくり引いて機首を上げます。しばらくすると「白白赤赤」に戻るので、適切な降下率(600~700ft/min)になるようサイドスティックを押して機首を下げます。
逆に「白白赤赤」から「白白白赤」になってしまったら、今の降下率が小さいということになります。適切な降下パスに戻るために、先ほど見積もった適切な降下率(600~700ft/min)よりちょっと大きい降下率(700~800ft/minくらい)になるようサイドスティックをゆっくり押して機首を下げます。しばらくすると「白白赤赤」に戻るので、適切な降下率(600~700ft/min)になるようサイドスティックを引いて機首を上げます。
このような微妙な調整を行いながら滑走路に近づきます。滑走路に近づけば近づくほど、ちょっとの操作が大きな誤差になってしまうため、早めに調整を行うことと、小さな調整を細かく行うことが重要です。
300ft(「スリー・ハンドレット」コール)

地面まで300ftとなりました。滑走路は目前ですね!少しだけ、滑走路の右側にそれてしまっているようですが、これぐらいであれば問題ありません。
ここら辺の高度でオートパイロットを切ってみてもよいでしょう。ここまでくると、オートパイロットを切ってもほぼ無操作でまっすぐ滑走路に降りることができます。必要に応じて上述した手動操作で降下率を調整しましょう。

オートパイロットを切るには「AP1」ボタンを押します。または、サイドスティックの赤色ボタンを押します。オートスロットルはそのままにしておきます。
オートパイロットの解除は着陸直前に行う操作のため、なるべく簡単にできるよう、お使いのフライトスティック等のコントローラのボタンに割り当てておくことをお勧めします。
不安なら、200ft・100ftぐらいまでオートパイロットを切るのを待ってもよいです。最初のうちは、なるべくオートパイロットを切るタイミングを遅らせて、着陸に至るコースのイメージを固めるのもよいでしょう。
「おとうふ」を目指す
地面まで200ftぐらいになるとコクピットの計器を見ている暇がだんだんなくなります。ここから先は、コクピットから見える景色も重要な要素です。

先ほど紹介したPAPIもそうですが、滑走路には着陸の目標となる白い大きな四角模様「目標点(接地点)標識」通称「おとうふ」があります。着陸する際はこの「おとうふ」に後輪が接地するように降下していきます。
簡単に言うと、この「おとうふ」目指して一直線に下りればよいのです。

「おとうふ」目指して一直線に下りるイメージで降下率を調整します。また、滑走路を手前に延長して、その上を飛行するイメージを持ちます。
ただしあくまでイメージで、視線を滑走路手前(上の図でいう黒い箇所)ばかりに持ってきてはいけません。目線が下がると不思議と吸い込まれるように高度が下がってきます。目線は「おとうふ」を主としながら「おとうふ」から先の滑走路全体も捉え続けます。目線は遠くに持っておいたほうが、機体の向き等の調整がしやすくなります。(車を運転する方なら、高速道路をスイスイ運転するときをイメージしていただければわかりやすいかと思います。先行車両を意識しつつも、その先のカーブを捉えてるようなイメージです。)
100ft(「ワン・ハンドレット」コール)
ここから先は着陸に向けて「フレア」操作(後輪から接地するよう、着陸直前に機首を上げる操作)が必要になってくるので、オートパイロットを切りましょう。
地面まで100ftになったとき、ちょうど滑走路の末端上空となるのが理想です。
もし、滑走路末端まで来ていないタイミングで100ftの読み上げがされたら、ほんのちょっとだけ降下率を下げる(サイドスティックを引く)か、「おとうふ」のちょっと手前に降りるイメージを持ちましょう。
逆に、滑走路末端を超えてから100ftの読み上げがされたら、「おとうふ」の向こう側に着陸するイメージを持ちましょう。
滑走路は長いですし、A320はブレーキも逆噴射も優秀なので、おとうふを行き過ぎて着陸してもちゃんと止まれますよ。
接地直前の操作
50ft
地面まで50ftの高さになると、高度の読み上げがカウントダウンのようになります。
地面まで50ftになったとき、ちょうど滑走路の末端上空となるのが理想です。
もし、滑走路末端まで来ていないタイミングで50ftの読み上げがされたら、ほんのちょっとだけ降下率を下げる(サイドスティックを引く)か、「おとうふ」のちょっと手前に降りるイメージを持ちましょう。
逆に、滑走路末端を超えてから50ftの読み上げがされたら、「おとうふ」の向こう側に着陸するイメージを持ちましょう。
滑走路は長いですし、A320はブレーキも逆噴射も優秀なので、おとうふを行き過ぎて着陸してもちゃんと止まれますよ。
40ft
50、40、30・・・と読み上げてくれるのですが、この読み上げ間隔も結構重要です。この読み上げが「504030!」みたいな感じで立て続けにコールされるようだと、降下率が大きすぎます。機首を少し上げて降下率を小さくしましょう。
こればかりはどうしても文章では伝わらないですね。。。「3!2!1!0!」みたいな感じでカウントダウンっぽく聞こえるスピード感であればよい、という感覚なのですが。
30ft(「サーティ」コール)
滑走路まで30ftになったら「フレア」操作を行います。後輪から接地するよう、機首をゆっくり上げましょう。機首上げ角度は5度です。

滑走路の中心から少し右側にずれてしまいましたが、問題ありません。目線は遠くに置いたまま、このまま着陸します。
滑走路中心からずれると、真ん中に合わせようと目線が手前に来がちです。そうなると機体の操作量が大きくなり、機体の制御が不安定になります。滑走路の端っこまで滑走したときに滑走路のセンターラインに来てればいいや、ぐらいの気持ちでいましょう。

機首上げ角度は「5度」です。ゆっくり機首を上げましょう。
20~10ft(「リタード」コール)
高さが残り20~10ftになると「リタード!リタード!」とコールされます。このコールを聞いたら、スラストを下げてエンジンの推力をアイドルにします。
この間もフレアでの機首上げ角度5度は維持しましょう。
余談ですが、この「リタード」コールって結構強めにいわれることと、なじみのない単語が着陸直前に急に出てくるので、最初は結構焦るんですよね。「なんかまずいことしちゃったかな」って最初のうちは思ってました。もっというと「リターン!」って言われているのかと勘違いしていました。「リタード(retard)」は「(速度を)減じる・遅くする」という意味のようです。
滑走路上で減速する
ここまで来たら無事滑走路に着陸できているはず・・・です。後輪が接地した後は自然と前輪が接地するので、無理やりサイドスティックを押し倒したりしないようにしましょう。
無事接地できたら、逆噴射を使って減速します。
まだこのタイミングで手動ブレーキ(マニュアルブレーキ)をかける必要はありません。アプローチ中に設定した「オートブレーキ」が適切なブレーキを自動でかけてくれます。逆に、手動でブレーキをかけてしまうと「オートブレーキ」が解除されてしまいます。
また、滑走路のセンターラインからずれて着陸してしまった場合は、ラダーを使って滑走路から逸れないように調整しましょう。この調整も「少なくとも滑走路から飛び出なければいいや」「最終的に滑走路のセンターラインに来てればいいや」という気持ちで微調整にとどめます。接地直後の飛行機は減速しているとは言っても非常に高速で移動中です。(100ktは180km/h!)高速道路で急ハンドルをしないのと同じで、着陸直後にラダーを大きく操作するとコントロール不能に陥る可能性があります。
逆噴射を使って減速する
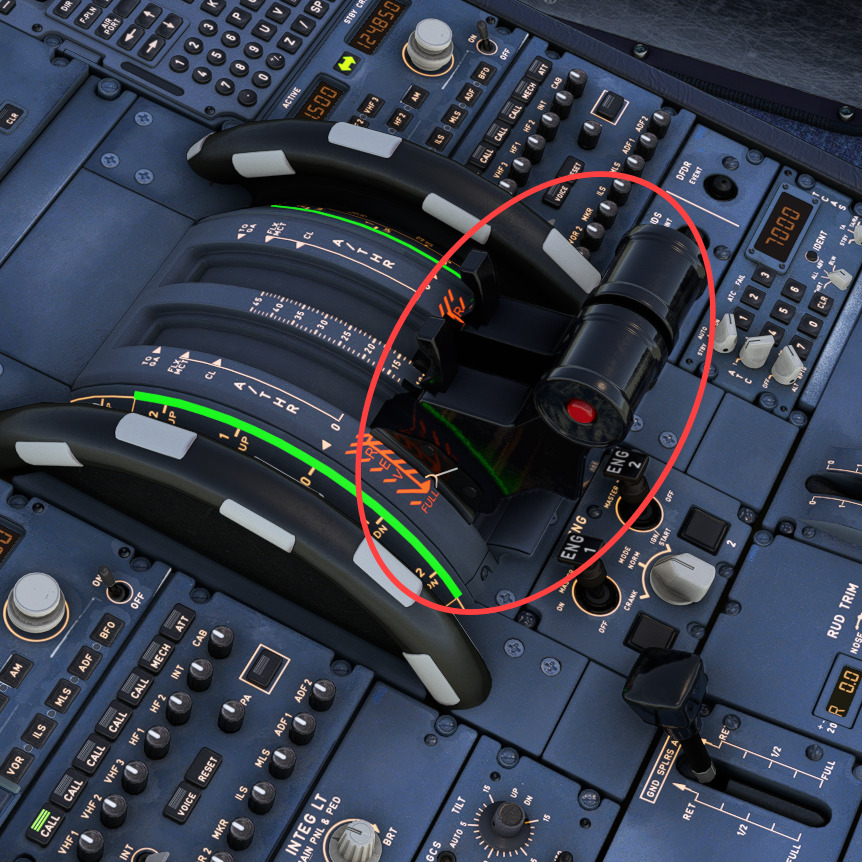
スラストをリバース位置まで引いて、逆噴射をかけます。この逆噴射は速度が60ktになるまで使います。60ktになったらアイドルに戻しましょう。
マニュアルブレーキを使って減速する
速度が60ktまで下がり逆噴射を止めたら、マニュアルブレーキをかけて40kt以下まで減速します。マニュアルブレーキをかけると、オートブレーキが解除されます。
滑走路を出る

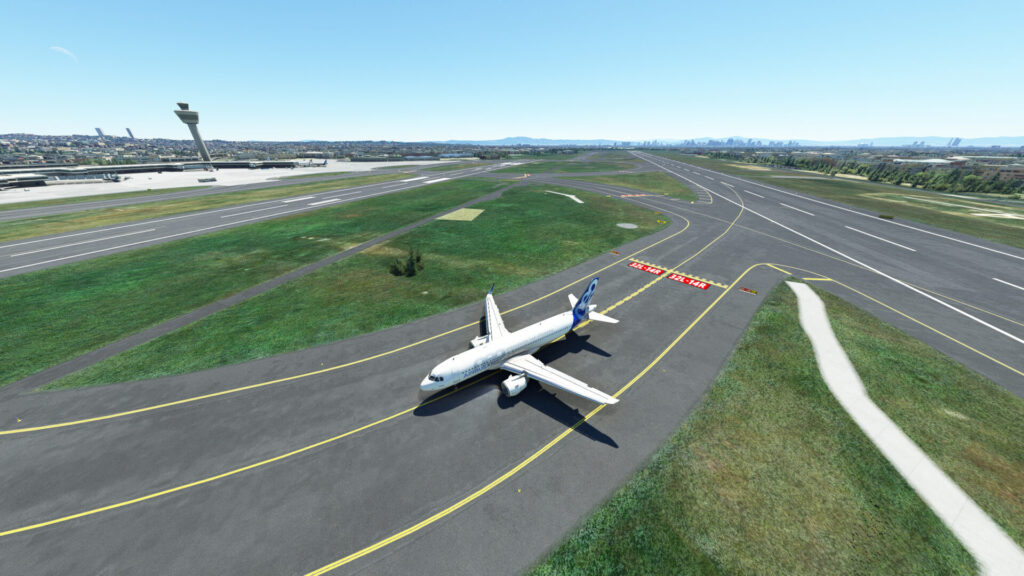
伊丹空港には「高速離脱誘導路」があります。簡単に言うと、滑走路に対して斜めに設置されている誘導路のことで、スピードをそこまで落とさずとも滑走路を出ることができます。30ktぐらいの速度で、サクッと滑走路を出てしまいましょう。
伊丹空港の場合、この「高速離脱誘導路」は複数本あるので、無理に減速したり速度を落としきれていないのに誘導路に入るのはやめて、おとなしく次の誘導路で出るようにしましょう。
もし着陸に時間がかかって、滑走路の先端まで来てしまった場合は、滑走路に対して直角に設置された普通の誘導路から出ることになります。その場合は、離陸の時と同様に10ktまでしっかり減速してから滑走路を離脱するようにしましょう。
着陸後の操作
お疲れさまでした!無事着陸でき、伊丹空港までたどり着くことができました!
あとはゲートに向かうだけですが、着陸後の操作がちょっとだけ残っています。滑走路を完全に抜けたら、一旦誘導路で止まって、一つ一つ確認しましょう。

- 滑走路を完全に抜けたら、誘導路上で停止して、「PARK BRK」を「ON」にします。
- 「フラップ」を「0」にします。
- 「グラウンドスポイラー」を格納状態(引き上げていたレバーをもとに戻す)にします。

- 「TCAS」を「STBY」にします。

- 「SYS」を「OFF」(真ん中)にします。
- 「PWS」を「OFF」にします。

- 「STROBE」を「OFF」にします。
- 「LAND」を「RETRACT」にします。
- 「NOSE」を「TAXI」にします。
- 「APU」の「MASTER SW」を「ON」にします。
- 「APU」の「START」を「ON」にします。
ゲートに到着したらエンジンを切る必要がありますが、エンジンを切っても電力等の供給ができるよう、APUを起動しておきます。

- 「LS」ボタンを押して「OFF」にします。
ゲートへタキシング

着陸後のライト類等の操作が終わったら、パーキングブレーキを解除して、ゲート(スポット)に向けてタキシングしましょう!ここでのタキシングは以前解説した内容と同じなので割愛します。

ゲート(スポット)は特に指定していないので、パッと見て空いているゲートに入ることにします。

黄色い線でピタッと停止しましょう!
マーシャラー(航空機の誘導をしてくれる人)がいるときといないときがあります。外部視点を駆使しながら停止しましょう。
エンジンの停止
スポットに駐機できたら、パーキングブレーキをかけるのを忘れないようにしましょう。
最後にエンジンを切ってフライトを終わりにします。
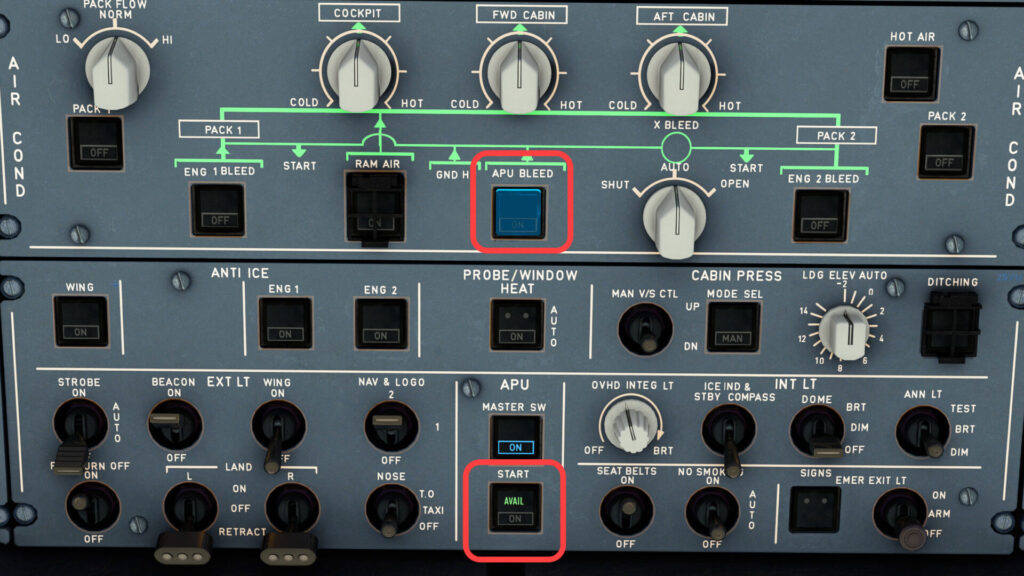
- 「APU」の「START」が「AVAIL」と緑色で表示されていることを確認します。
- 「APU BLEED」を「ON」にします。

- 「RWY TURN OFF」を「OFF」にします。
- 「NOSE」を「OFF」にします。

- 「ENG」の「MASTER1・2」ともに「OFF」にします。
エンジンを停止した後は
エンジンをシャットダウンすると、MSFS2020のフライトログが表示されます。ここでフライトを終了することもできますが、空港の周りをドローンカメラで散策したりする場合はフライトを継続してもよいでしょう。
そのときはA320でももうちょっとだけ操作してあげましょう。

- 「BECON」を「OFF」にします。
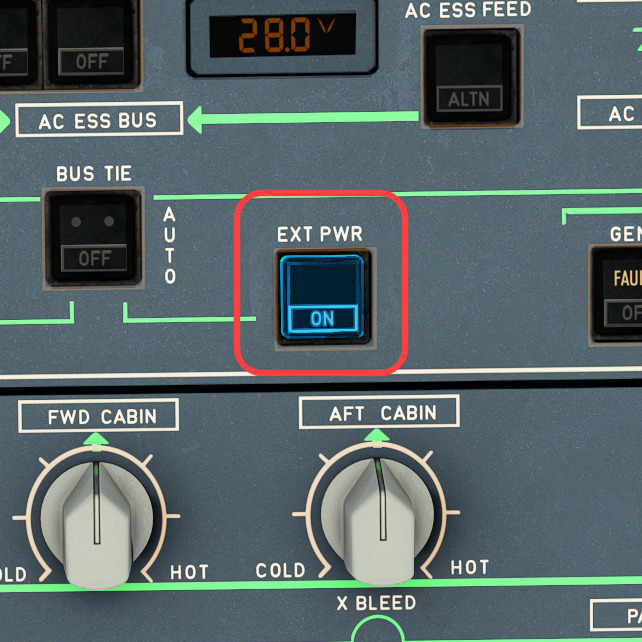
- 「EXT PWR」を「ON」にします。

- 「SEAT BELTS」を「OFF」にします。
これでお客さんが降りられますね!
お疲れ様でした!

約1時間ほどのフライトになったかと思います。お疲れさまでした!無事伊丹空港までたどり着けましたでしょうか?
やはり、着陸は最初のうちは難しいかと思います。こればかりは知識だけではなく、感覚も重要になってきます。自転車や車と同じように、何回か繰り返しチャレンジすることでその感覚も徐々に身についてくるはずです。
MSFS2020はコクピットの計器等の再現だけにとどまらず、周りの風景の再現度が非常に高いです。そして着陸時は計器だけでなく、周りの風景、滑走路の見え方なども非常に重要な情報になります。計器ばかりを追うのではなく、滑走路の見え方など、景色から得る情報を意識しながら着陸にチャレンジしましょう。
着陸がうまくいかないとき。。。ゴーアラウンドの方法はこちら。